

The design of CockroachDB is based on Google’s Spanner data storage system. One of the most surprising and inspired facets of Spanner is its use of atomic clocks and GPS clocks to give participating nodes really accurate wall time synchronization. The designers of Spanner call this “TrueTime”, and it provides a tight bound on clock offset between any two nodes in the system. This lets them do pretty nifty things! We’ll elaborate on a few of these below, but chief among them is their ability to leverage tightly synchronized clocks to provide a high level of external consistency (we’ll explain what this is).
If someone knows even a little about Spanner, one of the first questions they have is: “You can’t be using atomic clocks if you’re building an open source database; so how the heck does CockroachDB work?”
It’s a very good question, and one we (try) to elaborate on here. As a Spanner-inspired system, our challenges lie in providing similar guarantees of external consistency without having magical clocks at hand. CockroachDB was intended to be run on off-the-shelf commodity hardware, on any arbitrary collection of nodes. It’s “cloud neutral” in that it can very well span multiple public and/or private clouds using your flavor-of-the-month virtualization layer. It’d be a showstopper to require an external dependency on specialized hardware for clock synchronization.
So what does CockroachDB do instead? Well, before answering that question, let’s dig a little deeper into why TrueTime was conceived for Spanner.
The Importance of Time in Distributed Systems
Time is a fickle thing. For readers unfamiliar with the complexities around time in distributed systems research, the thing to know about it all is this: each node in the system maintains its own view of time, powered by its own on-chip clock device. This clock device is rarely ever going to be perfectly in sync with other nodes in the system, and as such, there’s no “absolute” time to refer to.
Existentialism aside, perfectly synchronized clocks are a holy grail of sorts for distributed systems research. They provide, in essence, a means to absolutely order events, regardless of which node an event originated at. This can be especially useful when performance is at stake, allowing subsets of nodes to make forward progress without regard to the rest of the cluster (seeing as every other node is seeing the same “absolute” time), while still maintaining global ordering guarantees. Our favorite Turing award winner has written a few words on the subject here.
Linearizability
By contrast, systems without perfectly synchronized clocks (read: every system) that wish to establish a complete global ordering must communicate with a single source of time on every operation. This was the motivation behind the “timestamp oracle” as used by Percolator. A system which orders transactions T1 and T2 in the order \[T1,T2] provided that T2 starts after T1 finishes, regardless of observer, provides for the strongest guarantee of consistency called “external consistency”. To confuse things further, this is what folks interchangeably refer to as “linearizability” or “strict serializability”. Andrei has more words on this soup of consistency models.
Serializability
Let’s follow one more tangent and introduce the concept of “serializability”. Most database developers are familiar with serializability as the highest isolation level provided by the ANSI SQL standard. It guarantees that the constituent reads and writes within a transaction occur as though that transaction were given exclusive access to the database for the length of its execution, guaranteeing that no transactions interfere with each other. In other words, no concurrent transaction T2 is able to read any partially-written state of transaction T1 or perform writes causing transaction T1 to read different values for the same key over the course of its execution.
In a non-distributed database, serializability implies linearizability for transactions because a single node has a monotonically increasing clock (or should, anyway!). If transaction T1 is committed before starting transaction T2, then transaction T2 can only commit at a later time.
In a distributed database, things can get dicey. It’s easy to see how the ordering of causally-related transactions can be violated if nodes in the system have unsynchronized clocks. Assume there are two nodes, N1 and N2, and two transactions, T1 and T2, committing at N1 and N2 respectively. Because we’re not consulting a single, global source of time, transactions use the node-local clocks to generate commit timestamps. To illustrate the trickiness around this, let’s say N1 has an accurate one but N2 has a clock lagging by 100ms. We start with T1, addressing N1, which is able to commit at ts=150ms. An external observer sees T1 commit and consequently starts T2 (addressing N2) 50ms later (at t=200ms). Since T2 is annotated using the timestamp retrieved from N2’s lagging clock, it commits “in the past”, at ts=100ms. Now, any observer reading keys across N1 and N2 will see the reversed ordering, T2's writes (at ts=100ms) will appear to have happened before T1's (at ts=150ms), despite the opposite being true. ¡No bueno! (Note that this can only happen when the two transactions access a disjoint set of keys.)
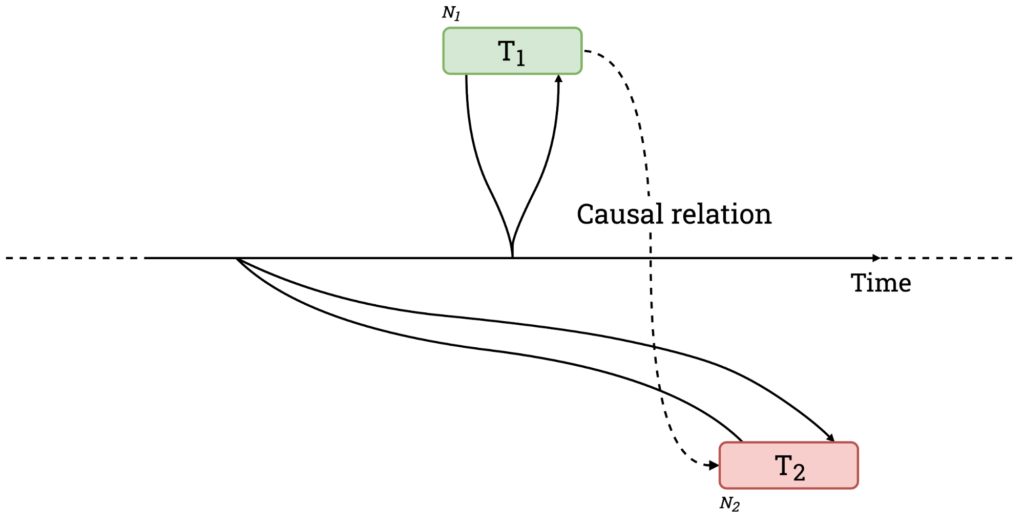
Figure 1. Causally related transactions committing out of order due to unsynchronized clocks.
The “anomaly” described above, and shown in Figure 1, is something we call “causal reverse”. While Spanner provides linearizability, CockroachDB only goes as far as to claim serializability, though with some features to help bridge the gap in practice. I’ll (lazily) defer to Andrei again, he really does cover a lot of ground here.
How does TrueTime provide linearizability?
OK, back to Spanner and TrueTime. It’s important to keep in mind that TrueTime does not guarantee perfectly synchronized clocks. Rather, TrueTime gives an upper bound for clock offsets between nodes in a cluster. Synchronization hardware helps minimize the upper bound. In Spanner’s case, Google mentions an upper bound of 7ms. That’s pretty tight; by contrast, using NTP for clock synchronization is likely to give somewhere between 100ms and 250ms.
So how does Spanner use TrueTime to provide linearizability given that there are still inaccuracies between clocks? It’s actually surprisingly simple. It waits. Before a node is allowed to report that a transaction has committed, it must wait 7ms. Because all clocks in the system are within 7ms of each other, waiting 7ms means that no subsequent transaction may commit at an earlier timestamp, even if the earlier transaction was committed on a node with a clock which was fast by the maximum 7ms. Pretty clever.
Careful readers will observe that the whole “wait out the uncertainty” idea is not predicated on having atomic clocks lying around. One could very well wait out the maximum clock offset in any system and achieve linearizability. It would of course be impractical to have to eat NTP offsets on every write, though perhaps recent research in this area may help bring that down to under a millisecond.
Fun fact: early CockroachDB had a hidden --linearizable switch that would do essentially the above, so theoretically, if you did have some atomic clocks lying around (or generally an acceptable maximum clock offset), you’d get Spanner-like behavior out of the box. We’ve since removed it given how under-tested it was, but perhaps it would make sense to resurrect it as cloud providers trend towards exposing TrueTime-like APIs. Chip-scale atomic clocks are a reality; putting one on server motherboards would beat the pants off a quartz crystal oscillator.
How important is linearizability?
Stronger guarantees are a good thing, but some are more useful than others. The possibility of reordering commit timestamps for causally related transactions is likely a marginal problem in practice. What could happen is that examining the database at a historical timestamp might yield paradoxical situations where transaction T1 is not yet visible while transaction T2 is, even though transaction T1 is known to have preceded T2, as they’re causally related. However, this can only happen if (a) there’s no overlap between the keys read or written during the transactions, and (b) there’s an external low-latency communication channel between clients that could potentially impact activity on the DBMS.
For situations where reordering could be problematic, CockroachDB makes use of a “causality token”, which is just the maximum timestamp encountered during a transaction. It’s passed from one actor to the next in a causal chain, and serves as a minimum timestamp for successive transactions to guarantee that each has a properly ordered commit timestamp. Of course, this mechanism doesn’t properly order independent causal chains, though imagining a use case where that’s a problem requires creativity.
But there’s a more critical use for TrueTime than ordering transactions. When starting a transaction reading data from multiple nodes, a timestamp must be chosen which is guaranteed to be at least as large as the highest commit time across all nodes. If that’s not true, then the new transaction might fail to read already-committed data – an unacceptable breach of consistency. With TrueTime at your disposal, the solution is easy; simply choose the current TrueTime. Since every already-committed transaction must have committed at least 7ms ago, the current node’s wall clock must have a time greater than or equal to the most recently committed transaction. Wow, that’s easy and efficient. So what does CockroachDB do?
How does CockroachDB choose transaction timestamps?
The short answer? Something not as easy and not as efficient. The longer answer is that CockroachDB discovers an appropriate timestamp for the transaction as it proceeds, sometimes restarting it at a later timestamp if needed.
As mentioned earlier, the timestamp we choose for the transaction must be greater than or equal to the maximum commit timestamp across all nodes we intend to read from. If we knew the nodes which would be read from in advance, we could send a parallel request for the maximum timestamp from each and use the latest. But this is a bit clumsy, since CockroachDB was designed to support conversational SQL where the read/write sets are indeterminate, we can’t know the nodes in advance. It’s also inefficient because we would have to wait for the slowest node to respond before even starting execution. Aside: readers may be interested in Calvin and SLOG, a family of research systems developed around declaring read/write sets upfront (though giving up conversational SQL) which consequently manages to avoid this class of problems.
What CockroachDB does instead is actually surprisingly similar to what Spanner does, though with much looser clock synchronization requirements. Put simply:
While Spanner always waits after writes, CockroachDB sometimes retries reads.
When CockroachDB starts a transaction, it chooses a provisional commit timestamp based on the current node’s wall time. It also establishes an upper bound on the selected wall time by adding the maximum clock offset for the cluster \[commit timestamp, commit timestamp + maximum clock offset]. This time interval represents the window of uncertainty.
As the transaction reads data from various nodes, it proceeds without difficulty so long as it doesn’t encounter a key written within this interval. If the transaction encounters a value at a timestamp below its provisional commit timestamp, it trivially observes the value during reads and overwrites the value at the higher timestamp during writes. It’s only when a value is observed to be within the uncertainty interval that CockroachDB-specific machinery kicks in. The central issue here is that given the clock offsets, we can’t say for certain whether the encountered value was committed before our transaction started. In such cases, we simply make it so by performing an uncertainty restart, bumping the provisional commit timestamp just above the timestamp encountered. Crucially, the upper bound of the uncertainty interval does not change on restart, so the window of uncertainty shrinks. Transactions reading constantly updated data from many nodes may be forced to restart multiple times, though never for longer than the uncertainty interval, nor more than once per node.
As mentioned above, the contrast between Spanner and CockroachDB is that Spanner always delays writes for a short interval, whereas CockroachDB sometimes delays reads. How long is that delay? It depends primarily on how often the same row is being read and written at nearly the same time. Most of the time when this happens, the read is simply retried once, so a hypothetical 2ms read becomes 4ms. If it’s unlucky, the read may have to be retried more than once. There is an upper limit on how many retries can occur based on how clocks are synchronized. For NTP, this could be 250ms, so even the most unlucky transactions won’t have to retry for more than 250ms for clock-related reasons.
Because CockroachDB relies on clock synchronization, nodes periodically compare clock offsets amongst themselves. If the configured maximum offset is exceeded by any node, it self-terminates. If you’re curious about what happens when maximum clock offsets are violated, we’ve thought about it a bit here.
Concluding thoughts
If you’ve made it this far, thanks for hanging in there. If you’re new to it, this is tricky stuff to grok. Even we occasionally need reminding about how it all fits together, and we built the damn thing.
If unraveling the challenges of clock synchronization in the face (or absence) of atomic clocks is your cup of tea, then great news — we’re hiring! Check out our open positions here.


